基于EAM数据集的UT1/LOD融合方法研究
近日,中国科学院国家授时中心研究团队提出了基于大气、海洋等地球流体有效角动量(EAM)数据集辅助的世界时(UT1)和日长(LOD)的融合算法,并成功构建了融合算法模型,将地球物理模型与大地测量技术相结合,有效提升了UT1产品精度。
由于EAM数据与LOD数据具有高度相关性,且在UT1和LOD的预报中被广泛应用。因此,研究团队提出将EAM数据引入到UT1融合中,以提升UT1产品精度。研究团队设计了一款11参数卡尔曼融合模型,将EAM、UT1、LOD数据进行融合,并在状态向量和状态转移矩阵中,考虑了LOD和EAM数据集的系统偏差和周期项。首先,使用傅里叶变换分析GNSS LOD数据集的系统偏差和周期性;其次,利用GNSS推导出的大地测量角动量(GAM)数据对EAM进行校正;最后,将三种数据进行融合,以得到精度更高、连续性更好、稳定性更强的融合UT1序列。
研究表明该融合算法对UT1数据的外符合精度提升超过30%,其中对于NTSC VLBI 的UT1数据集精度提升接近54%,对于国际IVS加强观测UT1数据集精度提升约30%;使用EAM、UT1、LOD数据集比仅使用UT1、LOD数据集融合效果更好,尤其对于具有高不确定性的UT1输入数据集,使用EAM数据集可以将UT1精度提高10 µs;该融合算法不仅可以修正LOD的系统偏差,而且对LOD数据精度具有一定的提升;外符合精度和卡尔曼估计不确定度的一致性,表明该卡尔曼融合模型的合理性和可靠性。
该项研究为进一步探索EAM对EOP融合领域的贡献提供了参考,对于国家标准时间产生、卫星授时、卫星导航等领域具有重要意义。
研究成果以题为《Research on Universal Time/Length of Day Combination Algorithm Based on Effective Angular Momentum Dataset》发表于期刊Remote Sensing。
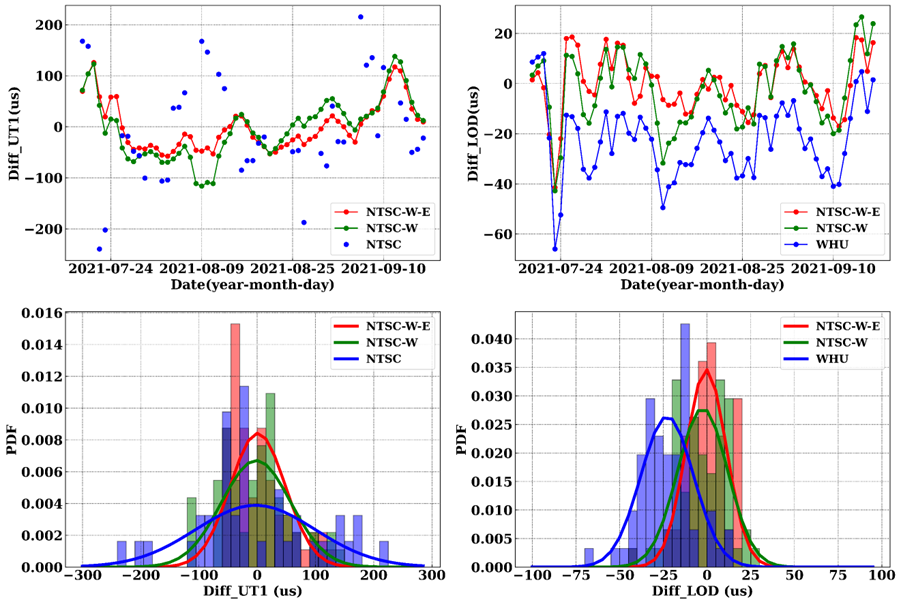
图 1 NTSC-WHU-EAM融合结果(左图为UT1,由于为LOD)
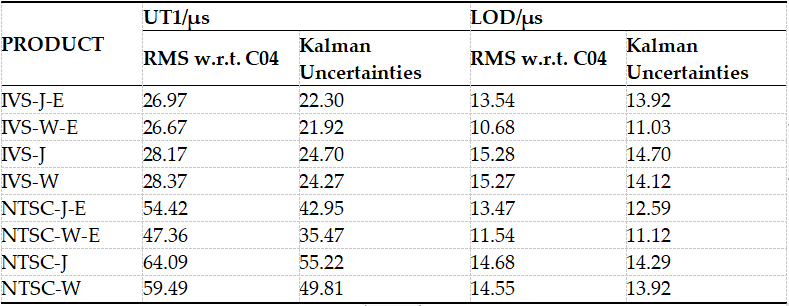
表1 融合后的外符合精度以及不确定度
附件下载:




